上QQ阅读APP看本书,新人免费读10天
设备和账号都新为新人
2.3.1 机器人本体
机器人本体又称操作机,是工业机器人的机械主体,是用来完成规定任务的执行机构,主要由机械臂、驱动装置、传动装置和内部传感器组成。对于六轴机器人而言,其机械臂主要包括基座、腰部、手臂(大臂和小臂)和手腕。其中:
• 基座是整个机器人的基础,布置有机器人的电气接口;
• 腰部位于大臂和基座之间,由A1轴电机驱动;
• 大臂位于小臂和腰关节之间,由A2轴电机驱动;
• 小臂位于大臂和腕关节之间,由A3轴电机驱动;
• 腕部有三个自由度,位于机器人输出端,包括A4轴、A5轴、A6轴。
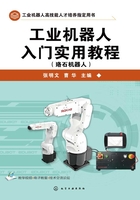
ROKAEXB4六轴机器人的本体如图2-8所示。

图2-8 ROKAE XB4六轴机器人本体示意图
图中,A1~A6为XB4机器人的6个轴。XB4机器人的规格和特性如表2-1所示。
表2-1 XB4机器人规格和特性

机器人运动范围如表2-2所示。
表2-2 机器人运动范围
