1.2.3 传感器的动态特性与指标
传感器的动态特性是指传感器对于随时间变化的输入信号的响应特性。通常希望传感器的输出信号和输入信号随时间的变化曲线一致或相近,但实际上两者总是存在着差异,因此必须研究传感器的动态特性。
研究传感器的动态特性首先要建立动态模型,动态模型有微分方程、传递函数和频率响应函数,可以分别从时域、复数域和频域对系统的动态特性及规律进行研究。
系统的动态特性取决于系统本身及输入信号的形式,工程上常用正弦函数和单位阶跃函数作为标准的输入信号。通常在时域主要分析传感器在单位阶跃输入下的响应;而在频域主要分析在正弦输入下的稳态响应,并着重从系统的幅频特性和相频特性来讨论。
1.传感器阶跃响应
传感器的动态模型可以用线性常系数微分方程表示,即

式中,a0、a1、…、an,b0、b1、…、bm是取决于传感器参数的常数,一般b1=b2=…=bm=0,而 b0 ≠ 0。若 n = 0,则传感器为零阶系统;若 n=1,则传感器为一阶系统;若 n=2,则传感器为二阶系统;若n≥3时,则传感器称为高阶系统。
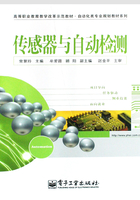
当传感器输入一个单位阶跃信号 u(t)时,其输出信号称为阶跃响应。常见的一阶、二阶传感器阶跃响应曲线如图1.10所示,主要动态指标包括:

图1.10 常见的一阶、二阶传感器阶跃响应曲线
(1)时间常数τ
时间常数指传感器输出y(t)由零上升到稳态值yc的63.2%所需的时间,如图1.10(a)所示。
(2)上升时间tr
上升时间指传感器输出y(t)由稳态值的10%上升到90%所需的时间,如图1.10(b)所示。
(3)调节时间ts
调节时间指传感器输出 y(t)由零上升达到并一直保持在允许误差范围±Δ%所需的时间。±Δ%可以是±2%、±5%或±10%,根据实际情况确定。
(4)最大超调量a
输出最大值ymax与输出稳态值yc的相对误差叫做最大超调量,即

(5)振荡次数N
振荡次数指调节时间内输出量在稳态值附近上下波动的次数。
(6)稳态误差ess
无限长时间后传感器的稳态输出值yc与目标值y0之间偏差的相对值叫稳态误差,即

2.传感器频率响应
将各种频率不同而幅值相等的正弦信号输入到传感器,其输出正弦信号的幅值、相位与频率之间的关系称为频率响应特性。频率响应特性可用频率响应函数表示,它由幅频特性和相频特性组成。
由控制理论可知,传感器的频率响应函数为

幅频特性:频率响应特性 G(jω)的模,即输出与输入的幅值比A(ω)=|G(jω)|称为幅频特性。以ω 为自变量、A(ω)为因变量的曲线称为幅频特性曲线。
相频特性:频率响应特性G(jω)的相角φ(ω),即输出与输入的相位差φ(ω)=-arctan G(jω)称为相频特性。以ω为自变量、φ(ω)为因变量的曲线称为相频特性曲线。
最小相位系统的幅频特性与相频特性之间存在一一对应关系,因此在进行传感器的频率响应分析时主要使用幅频特性。图1.11所示为典型测量仪表的幅频特性。当测量仪表的输入信号频率较低时,测量仪表能够在精度范围内检测到被测量;随着输入信号频率的增大,幅频特性逐渐减小,测量仪表将无法等比例复现被测量。

图1.11 测量仪表幅频特性
幅频特性中对应于幅值为 0.707A(0)时的频率称为截止频率ωb。对应的频率范围 0≤ω≤ωb称为频带宽度,频带宽度反映了测量仪表对快变信号的检测能力。